
SoilSCAPE: Soil Moisture Sensing Controller and oPitmal Estimator
This project introduces a new concept for a smart wireless sensor web technology for optimal measurements of surface-to-depth profiles of soil moisture using in-situ sensors. The objective is to enable a guided and adaptive sampling strategy for the in-situ sensor network to meet the measurement validation objectives of spaceborne soil moisture sensors such as the Soil Moisture Active Passive (SMAP) mission.
This Project is Funded by NASA Earth Science Technology Office.
Project PI: Mahta Moghaddam

Resource Allocation in Multirobot Teams
Limited on-board power is a key challenge for mobile robots on long duration deployments, such as environmental monitoring tasks. Current solutions that addresses the power issue requires robots to return to docking stations to charge or spend significant time charging on-field, both of which can disrupt the mission. We model how robots use power, so that we can predict when power is needed and deliver power using faster, more agile robots, minimizing downtime. Other resources can be similarly modeled and replaced, including cameras, sensors, chips, and effectors.
This Project is Funded by the Office of Naval Research.
Project PI: Nora Ayanian
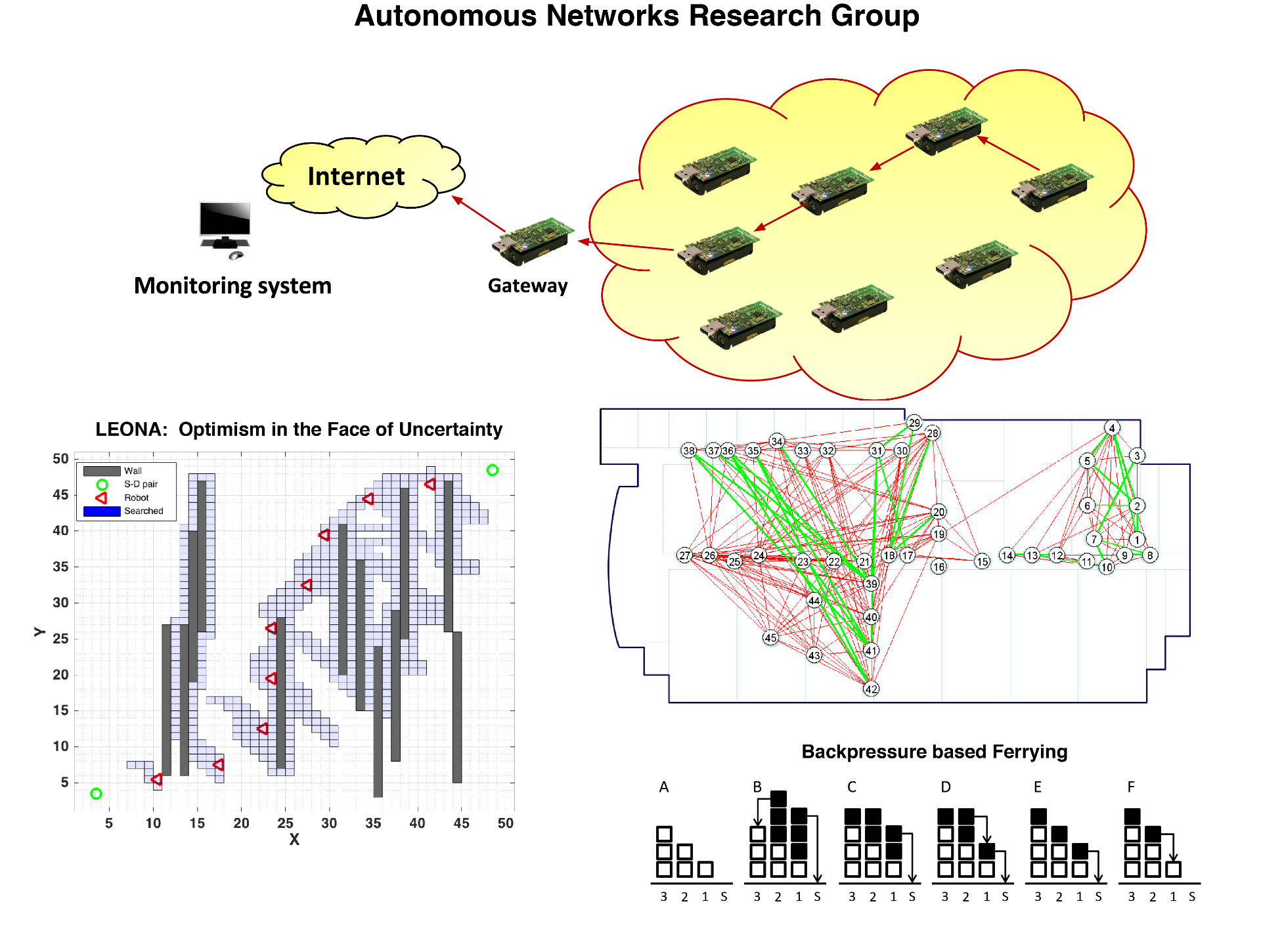
Autonomous Networks Research Group (ANRG)
Delivering information across wireless sensor and robotic networks is no easy task. In the Autonomous Networks Research Group (ANRG), our goal is to transfer critical data across the network in a timely manner, regardless of scale. We focus on pushing the boundaries in all layers of the communication stack, ranging from media access control up to application layer protocols.
Route-Swarm Video Demo:
The goal of this project is to use a group of robots to form a wireless communication backbone between pairs of static communication endpoints that are unable to communicate otherwise.
The system has a two layer architecture called INSPIRE (INformation and Sensing driven Physically REconfigurable robotic network) with low level referred as Physical Control Plane (PCP), and the higher level referred to as Information Control Plane (ICP). At the PCP level, iterative local communications between neighboring robots is used to shape the physical network topology by manipulating agent position through motion. At the ICP, more sophisticated multi-hop network algorithms enable efficient sensing and information routing.
Applications of these kinds of controllable Ad-Hoc architecture range from search and rescue in disasters scenarios, environmental observations and ecological monitoring to domestic and personal robots collaboration in homes and workplaces.
River-Swarm Demo:
The goal of this project is to develop a swarming algorithms that takes advantage of network information such as connectivity, network graph to move around cluttered environment. The group of robots use different potentials such as attraction, repulsion, collision avoidance for swarming and movement. On top of that, we apply Delaunay triangulation based method to detect a hole in the networks as an indicator of obstacle and apply a connectivity aware potential to pull the robots around the the obstacle.
Backpressure Control of Message Ferrying Robots:
In Backpressure based Ferrying, the problem of how to dynamically design allocation and scheduling algorithms for robotic message ferries to improve the throughput and delay of wireless networks is investigated. Backpressure-based control enables us to dynamically allocate robots and control their movements based on the current network information, i.e., queue size and transmission rate.
Lead Investigator: Bhaskar Krishnamachari