A brief overview of active research efforts, experimental facilities, and publicly-available software tools can be found below. Feel free to contact Dr. Luhar for further information.
Research Projects
-
Development of porous and patterned surfaces for turbulence control
- Efstathiou C* and M Luhar (2018) Mean turbulence statistics in boundary layers over high-porosity foams, Journal of Fluid Mechanics, 841: 351-379
- Chavarin A* and M Luhar (2020) Resolvent Analysis for Turbulent Channel Flow with Riblets, AIAA Journal, 58(2): 589-500
- Li Y, H Mao, P Hu, M Hermes*, H Lim, J Yoon, M Luhar, Y Chen, and W Wu (2019) Bioinspired Functional Surfaces Enabled by Multiscale Stereolithography, Advanced Materials Technologies, 1800638
- Chavarin A*, C Efsathiou*, S Vijay*, and M Luhar (2020) Resolvent-based design and experimental testing of porous materials for passive turbulence control, International Journal of Heat and Fluid Flow, 86, 108722
- Chavarin A*, G Gomez-de-Segura, R Garcia-Mayoral, and M Luhar (2021) Resolvent-based predictions for turbulent flow over anisotropic permeable substrates, Journal of Fluid Mechanics, 913, A24
- Chavarin A* and M Luhar (2022) Optimization of riblet geometry via the resolvent framework, AIAA 2022-1037
-
Seastar-Inspired Robotics
- Hermes M*, M Ishida, M Luhar and M Tolley (2021) Bioinspired shape-changing soft robots for underwater locomotion: actuation and optimization for crawling and swimming, In: Paley DA, Wereley NM (eds) Bioinspired Sensing, Actuation, and Control in Underwater Soft Robotic Systems. Springer, Cham.
- Hermes M* and M Luhar (2021) Sea stars generate downforce to stay attached to surfaces, Scientific Reports, 11(1), 1-9
- Hermes M*, T McLaughlin, M Luhar and Q Nguyen (2021) Locomotion and Control of a Friction-Driven Tripedal Robot, In 2021 IEEE International Conference on Robotics and Automation (ICRA) (pp. 2170-2176)
- Hermes M* and M Luhar (2023) Frictional Locomotion of a Radially Symmetric Tripedal Robot, Journal of Nonlinear Science, 33(3), 50.
-
Flexible wings with tunable (asymmetric) structural response

- MacPhee DW and M Luhar (2018) Asymmetric buckling of curved flapping wings, AIAA 2018-3079
- MacPhee DW, K Kincaid, and M Luhar (2022). Aerodynamic behavior of curved flexible wings, Journal of Fluids and Structures, 112, 103609.
-
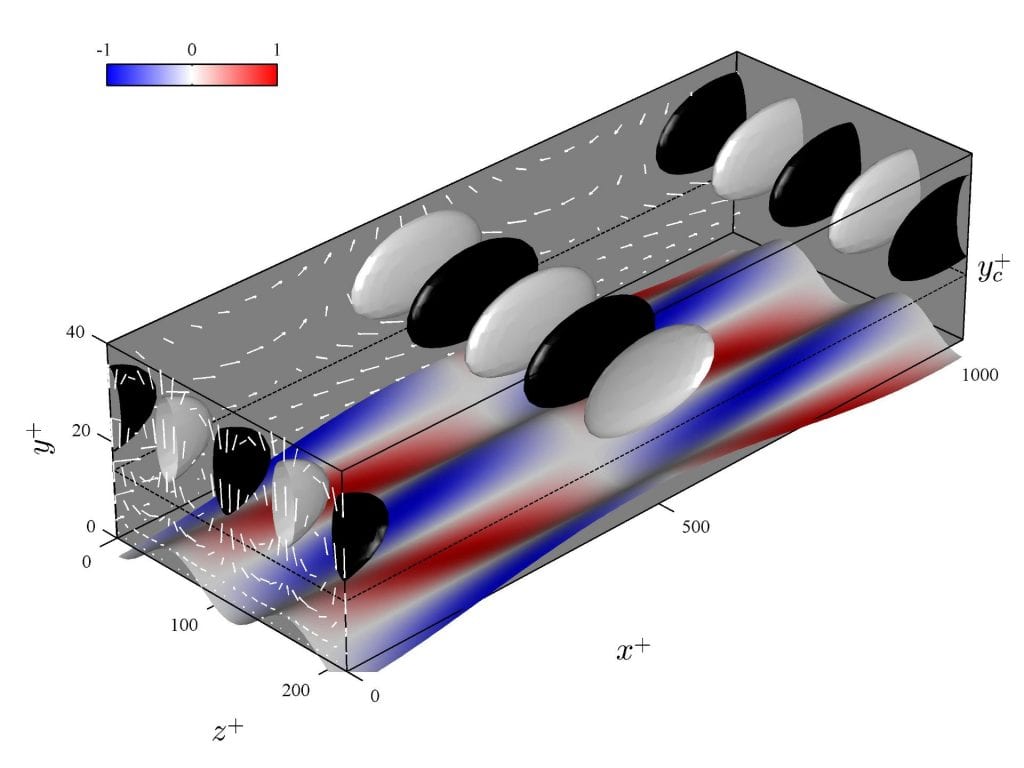
Model-based development of active flow control in wall turbulence
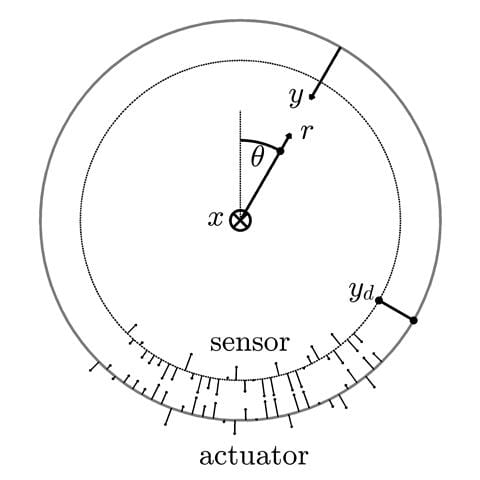
- Luhar M, AS Sharma, and BJ McKeon (2014) Opposition control within the resolvent analysis framework, Journal of Fluid Mechanics, 749: 597-626
- Nakashima S, K Fukagata and M Luhar (2017) Assessment of suboptimal control for turbulent skin friction reduction via resolvent analysis, Journal of Fluid Mechanics, 828: 496-526
- Kawagoe A, S Nakashima, M Luhar, and K Fukagata (2019) Proposal of control laws for turbulent skin friction reduction based on resolvent analysis, Journal of Fluid Mechanics, 866: 810-840
- Toedtli S, M Luhar, and BJ McKeon (2019) Predicting the response of turbulent channel flow to varying-phase opposition control: Resolvent analysis as a tool for flow control design, Physical Review Fluids, 4(7): 073905
-
Turbulence over compliant walls
- Luhar M, AS Sharma and BJ McKeon (2015) A framework for studying the effect of compliant surfaces on wall turbulence, Journal of Fluid Mechanics, 768: 415-441
- Luhar M, AS Sharma and BJ McKeon (2016) On the design of optimal compliant walls for turbulence control, Journal of Turbulence, 17(8): 787-806
-
Flow-induced dynamics of flexible blades

- Luhar M and HM Nepf (2011) Flow-induced reconfiguration of buoyant and flexible aquatic vegetation, Limnology and Oceanography, 56(6): 2003-2017
- Luhar M and HM Nepf (2016) Wave-induced dynamics of flexible blades, Journal of Fluids and Structures, 61: 20-41
- Luhar M, E Infantes and H Nepf (2017) Seagrass blade motion under waves and its impact on wave decay Journal of Geophysical Research – Oceans, 122, 2017JC012731
-
Passive stability of idealized wings (w/ Dr. Kanso at USC)
- Ohh C (2018) Passive Rolling and Flapping Dynamics of a Heaving Λ Flyer, MS Thesis
- Huang Y, L Reistroph, M Luhar, and E Kanso (2018) Bistability in the rotational motion of rigid and flexible flyers, Journal of Fluid Mechanics, 849: 1043-1067
-
Data-Driven Classification and Reconstruction of Turbulent Flows
- Krishna, CV*, M Wang, M Hemati, and M Luhar (2020) Reconstructing the time evolution of wall-bounded turbulent flows from non-time resolved PIV measurements, Physical Review Fluids, 5, 054604 (highlighted as an Editor's Suggestion!)
- Wang M., CV Krishna*, M Luhar, and MS Hemati (2021) Model-based multi-sensor fusion for reconstructing wall-bounded turbulence, Theoretical and Computational Fluid Dynamics, 35(5), 683-707
- Chinta, VK*, CY Ohh, G Spedding, and M Luhar (2022) Regime identification for stratified wakes from limited measurements: A library-based sparse regression formulation, Physical Review Fluids, 7(3), 033803
Codes and Tutorials
Please see the following GitHub repositories for public-available MATLAB codes on:
- Resolvent Analysis: Developed together with Dr. Beverley McKeon at Caltech and Dr. Ati Sharma at University of Southampton. This particular code is in primitive variables. In addition to the standard no-slip boundary condition, it can also handle simplified conditions corresponding to active and passive control (e.g., opposition control and compliant walls). Dr. Luhar also provided a tutorial on resolvent analysis at the AIAA Aviation meeting in 2016, as part of an invited session on modal analysis methods.
- Dynamic Blade: Developed as part Dr. Luhar’s Ph.D. thesis working with Dr. Heidi Nepf. This is a simple finite difference code to simulate the dynamics of inextensible, elastic blades (or beams) under oscillatory flow.
Facilities
All large-scale experiments take place in the Blue Water Channel at USC (see photos below). This is a free-surface facility with a test section of length 7.6 m, width 0.9 m, and depth 0.6 m. Flows with free-stream velocities up to 0.6 m/s can be generated in this facility with turbulence levels below 1%. In addition, we have several bench-top experiments that are housed in a separate lab space.


Current instrumentation includes:
- 2D LDV with a 500 mm standoff distance mounted on a precision traverse (MSE miniLDV).
- Submersible fiber-film hot wire boundary layer probes (Dantec miniCTA).
- 2D-2C PIV system consisting of a 5 W CW laser and a 1 MP high-speed camera (Phantom VEO 410-L) capable of generating velocity measurements at 5200 Hz.
- 2D-2C PIV system comprising a double-pulsed Nd:YAG laser (Litron Nano-L PIV; 50 mJ/pulse) and a 4 MP CMOS camera (Dalsa Falcon2) capable of generating velocity measurements at 50 Hz.
- Several FDM 3D printers (Prusa I3) and two SLA 3D printers (formlabs Form2 and Form3).