Walking is one of the primary ways that we move through our environment. As a result of development and experience, we gain the ability to seamlessly transition between different walking surfaces such as pavement, soft sand, or icy sidewalks. Learning to switch between these types of environments requires the nervous system to adapt the sensorimotor calibrations used for one context to produce the appropriate motor commands for another. This process of sensorimotor adaptation is critical for normal behavior and may also underlie the processes by which the body adapts to damage of central or peripheral motor structures.
Ongoing Projects
Optimization Principles Underlying Adaptation to Walking on a Split-belt Treadmill
While walking is a complex, whole-body task, some underlying factors clearly govern our choice of gait. This choice may arise from a combination of previous habits and attempts to reduce the costs associated with multiple metrics (e.g. effort, stability, aesthetics, or fear of falling). For example, metabolic cost plays a role in determining many aspects of an individual’s preferred gait, such as preferred stride length, step width, and vertical body motion. In addition to the cost associated with energy expenditure, costs related to balance or fall risk are also likely to have a marked influence on the gait an individual selects.
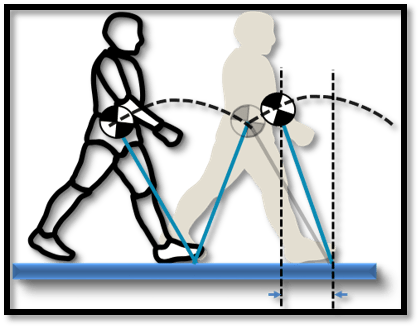
We are particularly interested in understanding how humans balance trade-offs between energetic cost and stability when adapting to imposed asymmetries. One way in which we accomplish this objective is by using a dual-belt treadmill adaptation paradigm to impose asymmetries in the walking environment. When healthy individuals are exposed to walking on a dual-belt treadmill where one belt moves faster than the other, they initially walk with steps of unequal length, but gradually adapt their walking pattern to take steps of equal length. However, the question of why symmetric step lengths are preferred when walking in an asymmetric environment remains unanswered.
Our studies in this area utilize a combination of behavioral experiments, physiological measurements, and neuromechanical modeling to understand how energetic cost and stability impact sensorimotor recalibration during human locomotion.
Publications
- Cornwell T, Novotny R, Finley JM. (2024). Associations between asymmetry and reactive balance control during split-belt walking. Journal of Biomechanics. 172:112221.
- Park S, Finley JM. (2022). Manual stabilization reveals a transient role for balance control during locomotor adaptation. Journal of Neurophysiology. 128: 808 – 818.
- Abram SJ, Poggensee KL, Sanchez N, Simha SN, Finley JM, Collins SH, Donelan JM. (2022). General variability leads to specific adaptation toward optimal movement policies. Current Biology. 32: 2222 – 2232.
- N Sánchez, S Simha, JM Donelan, JM Finley. (2021). Using asymmetry to your advantage: learning to acquire and accept external assistance during prolonged split-belt walking. J Neurophysiol. 2021 Feb 1;125(2):344-357.
- Liu C and Finley JM (2020). Asymmetric gait patterns alter the control of intersegmental coordination in response to perturbations during walking. PLOS One; 15(5):e0224187
- Sanchez, N., Simha, S. N., Donelan, J. M., & Finley, J. M. (2019). Taking advantage of external mechanical work to reduce metabolic cost: the mechanics and energetics of split‐belt treadmill walking. The Journal of physiology.
- Nozari, P., & Finley, J. M. (2019). Development of a Platform to Evaluate Principles of Bipedal Locomotion Using Dynamical Movement Primitives. In 2019 9th International IEEE/EMBS Conference on Neural Engineering (NER) (pp. 1062-1065). IEEE.
- C. Liu, L. De Macedo, and J. M. Finley. (2018). Conservation of Reactive Stabilization Strategies in the Presence of Step Length Asymmetries during Walking. Frontiers in Human Neuroscience, 12, 251.
- J.M. Finley. (2017). Splitting the difference: New insights into distinguishing features of human versus feline models of adaptive locomotor control. Journal of Physiology. 595(17):5723-5724.
- N. Sánchez, S. Park, and J.M. Finley (2017). Evidence of Energetic Optimization during Adaptation Differs for Metabolic, Mechanical, and Perceptual Estimates of Energetic Cost. Scientific Reports. 7(1):7682.c
- S. Park and J.M. Finley. (2017). Characterizing dynamic balance during adaptive locomotor learning. Conf Proc IEEE Eng Med Biol Soc 1: 50-53
- A. Marjaninejad and J.M. Finley. (2016). A model-based exploration of the role of pattern generating circuits during locomotor adaptation. Conf Proc IEEE Eng Med Biol Soc 1: 21-24.
- J.M. Finley, A. Long, A.J.Bastian, and G. Torres-Oviedo (2015). Spatial and Temporal Control Contribute to Step Length Asymmetry during Split-Belt Adaptation and Hemiparetic Gait. Neurorehabilitation and Neural Repair. 29:786-95.
- A. Long, J.M. Finley, A.J. Bastian.(2015). A Marching-Walking Hybrid Induces Step Length Adaptation and Transfers to Natural Walking. Journal of Neurophysiology. 113, 3905-3914.
- J.M. Finley, M.S. Statton, A.J. Bastian.(2014) A Novel Optic Flow Pattern Speeds Split-belt Locomotor Adaptation. Journal of Neurophysiology. 111, 969-976.
- J.M. Finley, A.J. Bastian, J.S.Gottschall. (2013). Learning to be Efficient: Metabolic Cost of Walking Tracks Motor Adaptation. Journal of Physiology. 591,1081-1095
Funding

Toward a Mechanistic Understanding of Optimization Principles Underlying Hemiparetic Gait
R01HD091184
PI: James M. Finley, Ph.D
Dates: 2017-2023

USC Zumberge Research and Innovation Award
PI: James M. Finley, Ph.D
Dates: 2015-2016
Engineering Career Development Award in Movement and Rehabilitation Sciences K12 HD073945
Scholar: James M. Finley, Ph.D
Dates: 2013-2015