We investigate the science and technology of mechanics-driven manufacturing, particularly at small scales (in the nano-micro-millimeter regime). Advanced manufacturing technologies at these length scales play crucial roles in addressing grand challenges in energy, environment, and healthcare. We aim to transform manufacturing capabilities in these contexts, through mechanics-driven approaches (e.g. self-assembly, strain engineering, mechanical buckling, and transfer printing) that involve mechanics, materials science, interfacial science, electronics, and others. Our focus areas include soft electronics for biomedical engineering, sensing and actuation of soft robotics, and engineered surfaces and interfaces. The following sections highlight some of these efforts.
Materials, Mechanics, and Manufacturing for Soft Electronics
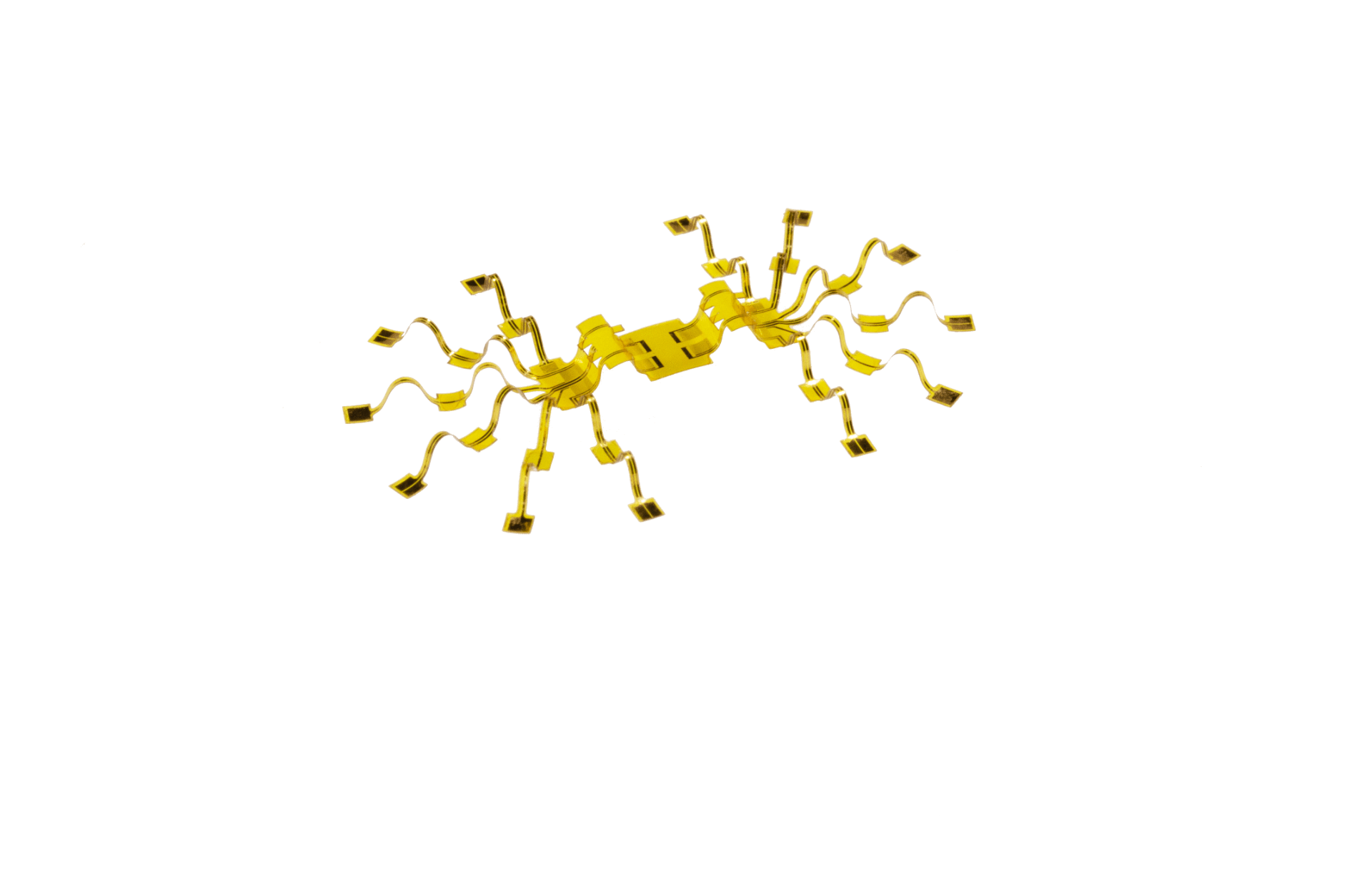
Advances in materials, mechanics, and manufacturing enable electronics that can bend, stretch, twist, and deform into complex, curvilinear shapes while maintaining functionalities of conventional wafer-based systems. These flexible and stretchable electronics bridge the mismatch between soft biological systems and conventional electronics. We focus on fundamental and applied research on flexible and stretchable electronics, including physical, electrophysiological, and biochemical sensors, as well as actuators and computing devices.
 Examples of flexible and stretchable electronic sensors and devices.
Examples of flexible and stretchable electronic sensors and devices.
Selected publications:
Q. Zhao, E. Gribkova, Y. Shen, J. Cui, N. Naughton, L. Liu, J. Seo, B. Tong, M. Gazzola, R. Gillette, H. Zhao, “Highly stretchable and customizable microneedle electrode arrays for intramuscular electromyography“, Science Advances, 10, eadn7202, 2024.
H. Zhao, Y. Kim, H. Wang, X. Ning, C. Xu, J. Suh, M. Han, G.J. Pagan-Diaz, W. Lu, H. Li, W. Bai, O. Aydin, Y. Park, J. Wang, Y. Yao, Y. He, M.T.A. Saif, Y. Huang, R. Bashir, J.A. Rogers, “Compliant 3D frameworks instrumented with strain sensors for characterization of millimeter-scale engineered muscle tissues“, Proceedings of the National Academy of Sciences (PNAS), 118, e2100077118, 2021.
H. Zhao, K. Li, M. Han, F. Zhu, A. Vázquez-Guardado, P. Guo, Z. Xie, Y. Park, L. Chen, X. Wang, H. Luan, Y. Yang, H. Wang, C. Liang, Y. Xue, R.D. Schaller, D. Chanda, Y. Huang, Y. Zhang, J.A. Rogers, “Buckling and twisting of advanced materials into morphable 3D mesostructures”, Proceedings of the National Academy of Sciences (PNAS), 116, 13239-13248, 2019.
M. Han, L. Chen, K. Aras, C. Liang, X. Chen, H. Zhao, K. Li, N.R. Faye, B. Sun, J.-H. Kim, W. Bai, Q. Yang, Y. Ma, W. Lu, E. Song. J.M. Baek. Y. Lee, C. Liu, J.B. Model, G. Yang, R. Ghaffari, Y. Huang, I.R. Efimov, J.A. Rogers, “Catheter-integrated soft multilayer electronic arrays for multiplexed sensing and actuation during cardiac surgery”, Nature Biomedical Engineering, 4, 997-1009, 2020.
Sensing and Actuation of Soft Robotics
Sensing and actuation are essential components in soft robotics, playing a key role in enabling autonomous and adaptive behavior for safe and effective operation within unstructured environments. The integration of soft sensors, actuators, and computational systems offers significant potential for the development of intelligent, responsive soft robots. Our research emphasizes advanced sensing technologies for proprioception and exteroception, innovative actuation methods, and the use of physics- and data-driven models. We explore applications of these integrated systems in fields such as manufacturing and medical robotics, pushing the boundaries of what soft robotic systems can achieve.
 Examples of proprioception of soft continuum robots using distributed strain sensors.
Examples of proprioception of soft continuum robots using distributed strain sensors.
Selected publications:
X. Huang, L. Liu, Y.H. Lin, R. Feng, Y. Shen, Y. Chang, H. Zhao, “High-stretchability and low-hysteresis strain sensors using origami-inspired 3D mesostructures“, Science Advances, 9, eadh9799, 2023.
Y. Kim, Y. Yang, X. Zhang, Z. Li, A. Vázquez-Guardado, I. Park, J. Wang, A.I. Efimov, Z. Dou, Y. Wang, J. Park, H. Luan, X. Ni, Y.S. Kim, J. Baek, J.J. Park, Z. Xie, H. Zhao, M. Gazzola, J.A. Rogers, R. Bashir, “Remote control of muscle driven miniature robots with battery-free wireless optoelectronics“, Science Robotics, 8, 74, eadd1053, 2023.
M. Han, X. Guo, X. Chen, C. Liang, H. Zhao, Q. Zhang, W. Bai, F. Zhang, H. Wei, C. Wu, Q. Cui, S. Yao, B. Sun, Y. Yang, Q. Yang, Y. Ma, Z. Xue, J.W. Kwak, T. Jin, Q. Tu, E. Song, Z. Tian, Y. Mei, D. Fang, H. Zhang, Y. Huang, Y. Zhang, J. A. Rogers, “Submillimeter-scale multimaterial terrestrial robots“, Science Robotics, 7, eabn0602, 2022.
Engineered Surfaces and Interfaces
Engineering of surfaces and interfaces is of great fundamental and practical interest. The ability to control processes such as wetting, adhesion, and transport on surfaces has a wide range of applications including phase change heat transfer, self-cleaning surfaces, advanced sensors, and microfluidic devices. We focus on developing innovative manufacturing methods for producing engineered surfaces and interfaces with bioinspired, complex architecture and surface properties for engineering applications.
 Optical and SEM images of M. aega butterfly scales and synthetic carbon nanotube scales fabricated by strain-engineered chemical vapor deposition .
Optical and SEM images of M. aega butterfly scales and synthetic carbon nanotube scales fabricated by strain-engineered chemical vapor deposition .
Selected publications:
H. Zhao, S. Park, B.R. Solomon, S. Kim, D. Soto, A.T. Paxson, K.K. Varanasi, A.J. Hart, “Synthetic butterfly scale surfaces with compliance-tailored anisotropic droplet adhesion”, Advanced Materials, 31, 1807686, 2019.
H. Zhao, S. Dash, N.S. Dhillon, S. Kim, B. Lettiere, K.K. Varanasi, A.J. Hart, “Microstructured ceramic-coated carbon nanotube surfaces for high heat flux pool boiling”, ACS Applied Nano Materials, 2, 5538-5545, 2019.
H. Zhao, C. Jacob, H.A. Stone, A. J. Hart, “Liquid imbibition in ceramic-coated carbon nanotube films”, Langmuir, 32, 12686-12692, 2016.