Extreme Agile and Robust Locomotion for Legged Robots
The goal of this work is to achieve extreme agile and robust locomotion for legged robots with a wide range of aggressive motion including fast running and high jumping on rough terrains. To achieve this, this project will explore solutions from the combination of robust and adaptive control, trajectory optimization, real-time optimal control, and machine learning.
Adaptive Forced-based Control for Dynamic Manipulation and Locomotion
Contact model including surface stiffness, damping and friction coefficient are critical for dynamic manipulation and locomotion, especially fast, agile motion and high-force interaction with the physical environment. Such problems also demand estimation of external disturbances, contact location, and contact model. Therefore, the goal of this project is to develop a novel adaptive forced-based control framework for both dynamic manipulation and locomotion to not only compensate uncertainty of robot dynamics, external disturbances but also estimate parameters of contact model in real-time. Designing successfully such adaptation law will enable the robot to rapidly react to the change of the environment, maintaining balance and performance.
Safety-critical Control for Autonomous Vehicles
The goal of the project is to develop a control algorithm for autonomous vehicles that can guarantee safety in emergency cases. In collaboration with Siemens PLM, we are developing a fast and reliable algorithm for obstacle avoidance using Exponential Control Barrier Functions (ECBF), a real-time feedback safety-critical control framework. The motivation of this project is to improve the performance of the current method using Model Predictive Control (MPC) that fails in many aggressive cases due to the limitation of prediction horizon and computation time. The ECBF method, in contrast, can formally guarantee safety for an infinite horizon. We are testing the algorithm on a commercial car simulator with an ultra-detailed and realistic model including car dynamics, engine, road condition, and aerodynamics, etc. The proposed methods will be validated on small-scale autonomous vehicles.
Past Projects
Robust Stair Climbing for Quadruped Robots
 The recent state-of-the-art controller for walking of quadruped robots commands foot placement on the ground or horizontal plane to control the body motion and reject disturbances. This approach can handle rough terrain with a small and gradual variation on ground heights. However, with discrete terrains like stairs or high obstacles, further development needs to be explored. To handle this issue, we have developed a novel approach including foot placement adjustment and speed adaptation that can enable the robot to blindly walk over stairs and obstacles without using any cameras, force sensors or prior knowledge of the terrain. To be more specific, whenever the robot foot hit an obstacle during walking, our contact algorithm can detect the obstacle and then adjust the desired foot placement of all four legs as well as the desired speed of the body to achieve a favorable robot configuration with a reachable desired motion. The method was implemented successfully on the MIT Cheetah 3 robot walking blindly on stairs.
The recent state-of-the-art controller for walking of quadruped robots commands foot placement on the ground or horizontal plane to control the body motion and reject disturbances. This approach can handle rough terrain with a small and gradual variation on ground heights. However, with discrete terrains like stairs or high obstacles, further development needs to be explored. To handle this issue, we have developed a novel approach including foot placement adjustment and speed adaptation that can enable the robot to blindly walk over stairs and obstacles without using any cameras, force sensors or prior knowledge of the terrain. To be more specific, whenever the robot foot hit an obstacle during walking, our contact algorithm can detect the obstacle and then adjust the desired foot placement of all four legs as well as the desired speed of the body to achieve a favorable robot configuration with a reachable desired motion. The method was implemented successfully on the MIT Cheetah 3 robot walking blindly on stairs.
Optimized Jumping for Quadruped Robots
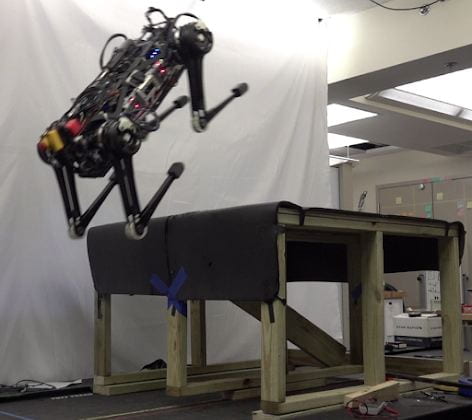 In contrast to wheeled or tracked vehicles, legs provide remarkable advantages for navigating uneven terrains, especially high obstacles. To realize and demonstrate this potential, this work presents a novel methodology for implementing optimized jumping behavior on quadruped robots. Our method includes efficient trajectory optimization, precise high-frequency tracking controller and robust landing controller for recovering the robot body position and orientation after impact. The experimental validation was successfully conducted on the MIT Cheetah 3, enabling the robot to repeatably jump onto and jump down from a standard-size desk with a height of 30” (76 cm). The result was featured widely in CNN, BBC, NBC, ABC, and many other major media channels.
In contrast to wheeled or tracked vehicles, legs provide remarkable advantages for navigating uneven terrains, especially high obstacles. To realize and demonstrate this potential, this work presents a novel methodology for implementing optimized jumping behavior on quadruped robots. Our method includes efficient trajectory optimization, precise high-frequency tracking controller and robust landing controller for recovering the robot body position and orientation after impact. The experimental validation was successfully conducted on the MIT Cheetah 3, enabling the robot to repeatably jump onto and jump down from a standard-size desk with a height of 30” (76 cm). The result was featured widely in CNN, BBC, NBC, ABC, and many other major media channels.
Dynamic Bipedal Locomotion over Stochastic Discrete Terrain
 Due to their morphology and mechanical design, bipedal robots have the ability to traverse over a wide range of terrain including those with discrete footholds like stepping stones. This work addresses the challenge of dynamic robotic walking over stochastically generated stepping stones with significant variations in terrain profiles. Specifically, our approach utilizes a 2-step periodic gait optimization technique to build a library of gaits, then can be used to obtain the desired gait in real-time based on terrain information emerged during walking. The proposed method is successfully validated on ATRIAS, an underactuated, human-scale bipedal robot, to achieve precise footstep placement. With no change in step height, step lengths are varied in the range of [23:78] cm. When both step length and step height are changed, their variation is within [30:65] cm and [-22:22] cm respectively. The average walking speed of both these experiments is 0.6 m/s. The conference publication of this work was nominated as the Best System Paper Finalist in the 2017 Robotics: Science & Systems conference (RSS). The result was also featured in many media channels such as IEEE Spectrum, TechCrunch, TechXplore, Digital Trends, etc.
Due to their morphology and mechanical design, bipedal robots have the ability to traverse over a wide range of terrain including those with discrete footholds like stepping stones. This work addresses the challenge of dynamic robotic walking over stochastically generated stepping stones with significant variations in terrain profiles. Specifically, our approach utilizes a 2-step periodic gait optimization technique to build a library of gaits, then can be used to obtain the desired gait in real-time based on terrain information emerged during walking. The proposed method is successfully validated on ATRIAS, an underactuated, human-scale bipedal robot, to achieve precise footstep placement. With no change in step height, step lengths are varied in the range of [23:78] cm. When both step length and step height are changed, their variation is within [30:65] cm and [-22:22] cm respectively. The average walking speed of both these experiments is 0.6 m/s. The conference publication of this work was nominated as the Best System Paper Finalist in the 2017 Robotics: Science & Systems conference (RSS). The result was also featured in many media channels such as IEEE Spectrum, TechCrunch, TechXplore, Digital Trends, etc.
Optimal Robust Safety-Critical Control for Dynamic Robotics
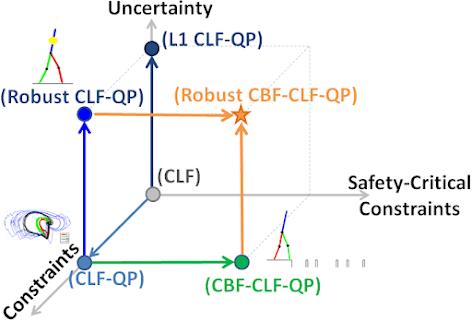 In recent years, the method of Hybrid Zero Dynamics (HZD), has been very successful in dealing with the hybrid and underactuated dynamics of legged locomotion. However, there are two primary shortcomings of this method: (1) it relies on an accurate dynamic model of the robot; and (2) it is designed for periodic walking. Therefore, this work focuses on addressing them by offering robust and adaptive tracking control and then robust and adaptive safety-critical control with application to dynamic walking of bipedal robots. Not only can the approach achieve stable dynamic walking, but it can also guarantee safety constraints (for example footstep placement, obstacle avoidance, friction, input-saturation, etc.) under a high level of model uncertainty and external disturbances. The approach results in successful validation on the simulator of the RABBIT robot walking over stepping-stones terrain while carrying an unknown load of 30 kg (94 % of the robot mass). Experimental validation of ATRIAS robot carrying an unknown load of 68 lb (31 kg) was also successfully conducted. In experiment, besides the adaptability to unknown dynamics of the robot, ground as well as the environment, the approach also demonstrated other interesting advantages including smoother control input, more energy-efficient, and softer ground impacts. The conference paper on robust safety-critical control won the Best Presentation of the Session in the 2016 American Control Conference (ACC).
In recent years, the method of Hybrid Zero Dynamics (HZD), has been very successful in dealing with the hybrid and underactuated dynamics of legged locomotion. However, there are two primary shortcomings of this method: (1) it relies on an accurate dynamic model of the robot; and (2) it is designed for periodic walking. Therefore, this work focuses on addressing them by offering robust and adaptive tracking control and then robust and adaptive safety-critical control with application to dynamic walking of bipedal robots. Not only can the approach achieve stable dynamic walking, but it can also guarantee safety constraints (for example footstep placement, obstacle avoidance, friction, input-saturation, etc.) under a high level of model uncertainty and external disturbances. The approach results in successful validation on the simulator of the RABBIT robot walking over stepping-stones terrain while carrying an unknown load of 30 kg (94 % of the robot mass). Experimental validation of ATRIAS robot carrying an unknown load of 68 lb (31 kg) was also successfully conducted. In experiment, besides the adaptability to unknown dynamics of the robot, ground as well as the environment, the approach also demonstrated other interesting advantages including smoother control input, more energy-efficient, and softer ground impacts. The conference paper on robust safety-critical control won the Best Presentation of the Session in the 2016 American Control Conference (ACC).